
Nouvelles

L'équipe SpartacUS entre dans le dernier tier de l'année 2015 et devra presenter le prototype fonctionnel dès décembre. La majeur partie des systèmes sont maintenant en production et l'équipe a pour mandat de faire l'intégration de tous les systèmes et de dûment les tester. Il y a très peu de place à l'erreur et tous les membres sont gonflés à bloc pour ce dernier marathon qui mènera à l'accomplissement de ces deux ans de conception.
La plateforme finale vous sera donc dévoilé lors de présentation MégaGéniale le 2 décembre prochain. L'équipe à vraiment hâte d'y être pour vous rencontrez et vous en parler.
L'équipe d'étudiants en génie électrique et informatique termine leur première session de travail en beauté, quelques petits retards, mais aussi des avancements qui contre-balance. Ils sont convaincus que les requis seront livrés dans les temps cet automne lors de leur retour dans les locaux de l'université. En attendant, l'équipe profite de l'été pour bonifier certains aspects du projet même s'ils sont tous employés à temps plein ailleurs en même temps. Ce plan de redressement tout au long du 2e tier permettra la communications des avancements avec l'équipe mécanique qui entâme leur avant dernière session.
Les équations dynamiques ont été développés et simulés. Les systèmes de communications ont été implémentés globalement. Une interface utilisateur sur machine virtuelle, communiquant avec le système central de l'exosquelette à été mise en oeuvre. Une première version du système nerveux temp-réel à été testé. Presque toutes les schématiques électroniques ont été modélisé et partirons en production avant la fin de Mai. Les drives ont été testé sur breadboard et finalement la télécommande à été choisie.
 User Interface |
|---|
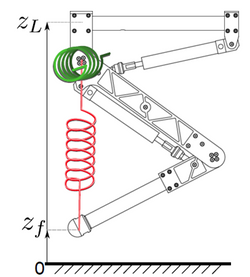 Leg Compliance Model |
 RTOS |
 Model |
 Command |
 GPOS |
 DSPIC |
 Schematic |
Globalement, l'architecture est fixé au niveau électronique et informatique. Cet été, l'équipe s'attaque à trois défis en particuliers pour amoindrir le lot de tâches cet automne, soit commencer les versions finale du système temps-réel et de celle des drives. Aussi, l'équipe va commencer à implémenter l'intelligence du système central en parallèle.

L'équipe mécanique pour sa part commence une nouvelle session remplie de défi. Ils devront revoir leur design suite à de multiple rencontres inter-équipes pour résoudre l'impossible quant au système d'entraînement, l'intégration des capteurs et le câblage des systèmes. De plus, ils devront revoir leur échéancier pour permettre une intégration tout en douceur à l'automne et également leur permettre d'aller plus loin dans le projet en orientant leur travaux sur l'ergonomie et l'esthétique dès cet automne.
L'équipe à également travaillé pendant leur stage pour être prêt lors de leur présente session. Les modèles dynamiques ont déjà commencés à être mis en oeuvre et plusieurs tests devront être effectués afin de fixé le design final suite aux nombreuses discussions sur le sujet.
Somme toute, le projet avance à grand pas et l'équipe à très hâte de présenter la plate-forme publiquement lors de la 21e exposition Mécagéniale de l'Université de Sherbrooke ce déroulant en Décembre 2015.
L'équipe d'étudiants en génie électrique et informatique de l'Exosquelette SpartacUS s'est intégrée au projet sans tarder et a pris de front le projet à la hauteur de son envergure. Les équipes des trois concentrations se sont concertés durant les premiers mois afin de s'assurer d'une vision convergente et de faire front commun.
Certaines modifications seront donc apportées aux plans initiaux afin d'assurer les fonctionnalités vitales du projet. L'équipe électrique et informatique s'engage maintenant dans la phase de conception préliminaire. Ainsi, les équipes d'informatique, d'électrique et de mécanique ont travaillé ensemble pour peaufiner l'échéancier et le design.
D'ici deux mois, l'équipe de génie électrique et informatique devrait avoir mis en place les schématiques finales et aura commencé le développement de la plupart des systèmes en vue de la période estivale. L'équipe mécanique pour sa part a déjà revu ses objectifs pour l'été et a redoublé d'efforts pour s'assurer de la cohésion du tout. Toutes les parties en sont d'autant plus motivées de l'engagement de tout un chacun et l'avancement va bon train.

 |
|---|
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
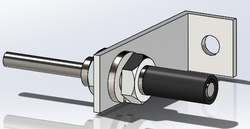
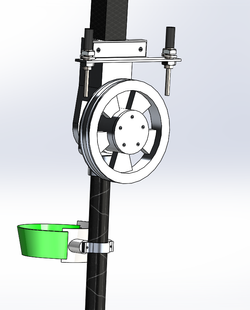
L'équipe d'étudiants en génie mécanique de l'Exosquelette SpartacUS vient de terminer la conception préliminaire du prototype. L'équipe a travaillé sans répit durant les quatre mois de la session d'automne pour arriver aux résultats que vous pouvez observer sur les nombreuses images présentes à gauche.
Tous les membres de l'équipe d'étudiants en génie mécanique seront maintenant en stage pour les 4 prochains mois. Par contre, ceci ne veut pas dire qu'ils ne travailleront plus sur le projet! Il y aura beaucoup de pain sur la planche pour la période d'hiver, dont des tests à effectuer sur différents types de câbles, la modélisation dynamique et beaucoup de calculs!
De plus, l'équipe d'étudiants en génie électrique et informatique commenceront leur travail durant la session d'hiver 2015. L'équipe sera donc toute réunie durant les premiers mois de l'année 2015 pour avancer le plus possible.